JSPT-C
This web page provides a full description of the instances and the results introduced in:
Amine Oussama, Jean-Philippe Gayon, Philippe Lacomme. Job-Shop Scheduling with Cooperative Transportation Resources. ROADEF 2025-26ème congrès de la société Française de Recherche Opérationnelle et d’Aide à la Décision, Paris, France, February 26-28 2025. (Submitting article)
Acknowledgements: We used the instances of (Ümit Bilge and Gündüz Ulusoy, 1995) for the classical JSPT to create new instances for the JSPT-C.
Dowload Instances and Results:
JSPT instances (Bilge and Ulusoy, 1995):

JSPT-C instances:
EX<Jobset><Layout>C<NR>, represents the original instance EX<Jobset><Layout> from (Bilge and Ulusoy, 1995) extended with cooperation constraints, where <NR> indicates the number of robots (Possible values are: 2, 3, 5, 7, 10). For example, the instance EX11C3 represents an instance with Jobset 1 and Layout 1 with 3 robots and cooperation constraints.Each instance folder contains the:
- Instance file:
EX<Jobset><Layout>C<NR>.txt, which represents the original instanceEX<Jobset><Layout>extended with cooperation requirements, where<NR>indicates the number of robots (Possible values are: 2, 3, 5, 7, 10). For example, the instanceEX11C3represents an instance with Jobset1and Layout1with 3 robots and cooperation requirements. - MILP (CPLEX) results:
EX<Jobset><Layout>C<NR>_Cplex.txt. - GRASP-ELS results for multiple runs:
EX<Jobset><Layout>C<NR>_GraspEls_Run_x.txt, wherexis the run number.
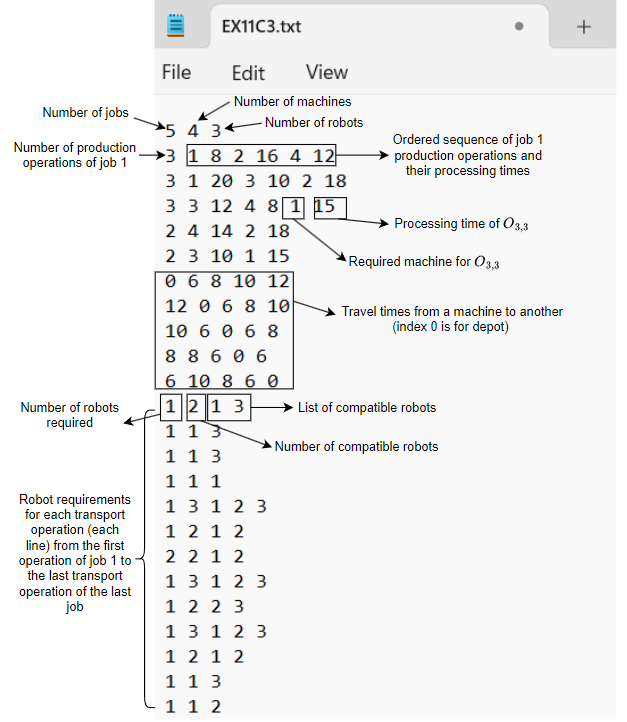
Instance files format:
Refer to the picture below for an example of the instance file EX11C3.txt
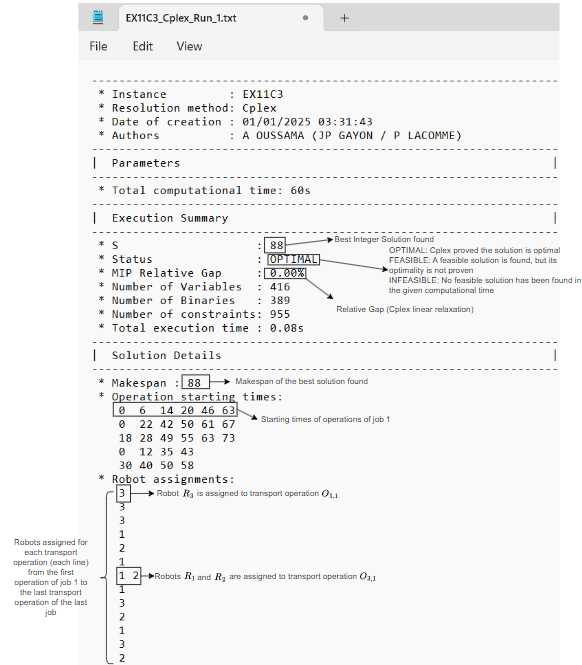
MILP (CPLEX) solution file format:
Refer to the picture below for an example of the MILP solution for the instance EX11C3
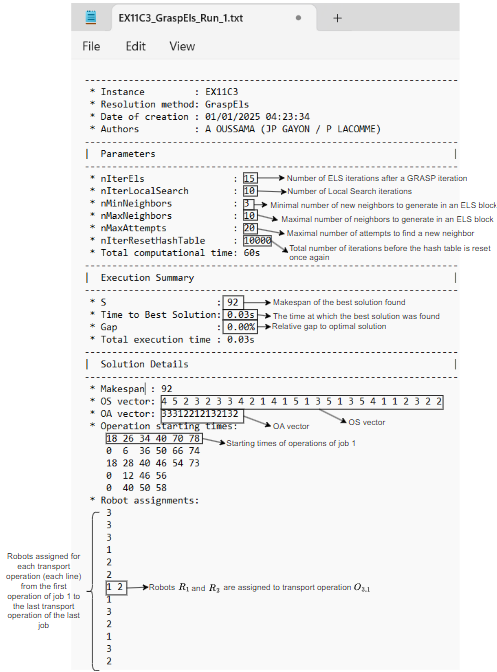
GRASPxELS metaheuristic solution file format:
Refer to the picture below for an example of the result of the first execution of GRASPxELS for the instance EX11C3